
2.5 CPU 是如何执行任务的?
CPU 如何读写数据的?
那么对数组的加载,CPU 就会加载数组里面连续的多个数据到 Cache 里,因此我们应该按照物理内存地址分布的顺序去访问元素,这样访问数组元素的时候,Cache 命中率就会很高,于是就能减少从内存读取数据的频率,从而可提高程序的性能。
但是,在我们不使用数组,而是使用单独的变量的时候,则会有 Cache 伪共享的问题,Cache 伪共享问题上是一个性能杀手,我们应该要规避它。
假设1、2线程需要A、B变量,且两个变量在同一个Cache Line里面
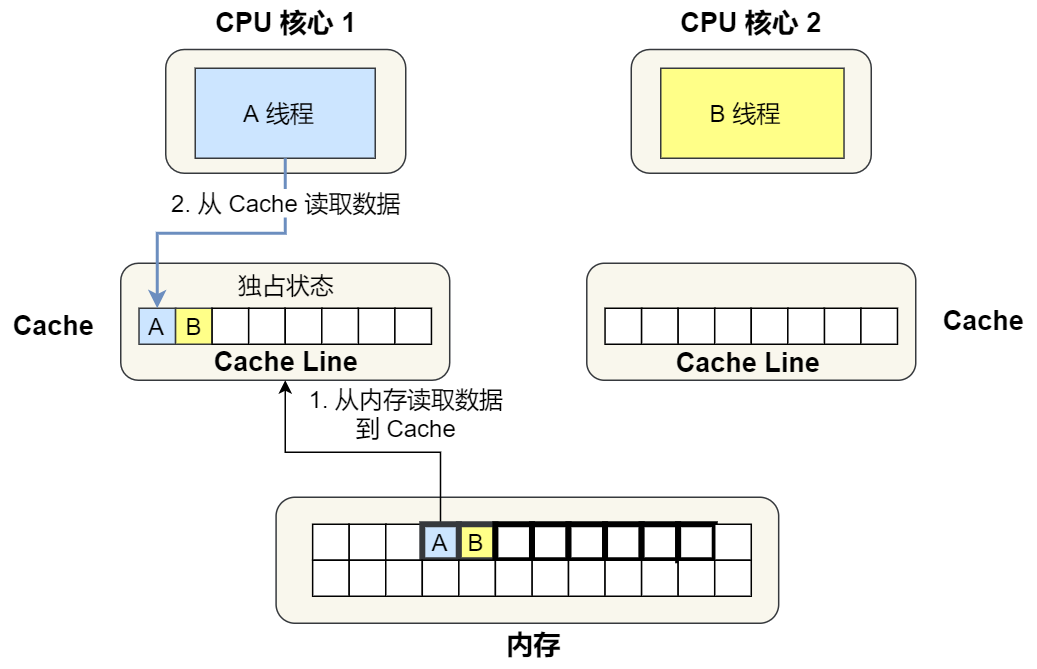
①. 最开始变量 A 和 B 都还不在 Cache 里面,假设 1 号核心绑定了线程 A,2 号核心绑定了线程 B,线程 A 只会读写变量 A,线程 B 只会读写变量 B。
②. 1 号核心读取变量 A,由于 CPU 从内存读取数据到 Cache 的单位是 Cache Line,也正好变量 A 和 变量 B 的数据归属于同一个 Cache Line,所以 A 和 B 的数据都会被加载到 Cache,并将此 Cache Line 标记为「独占」状态。
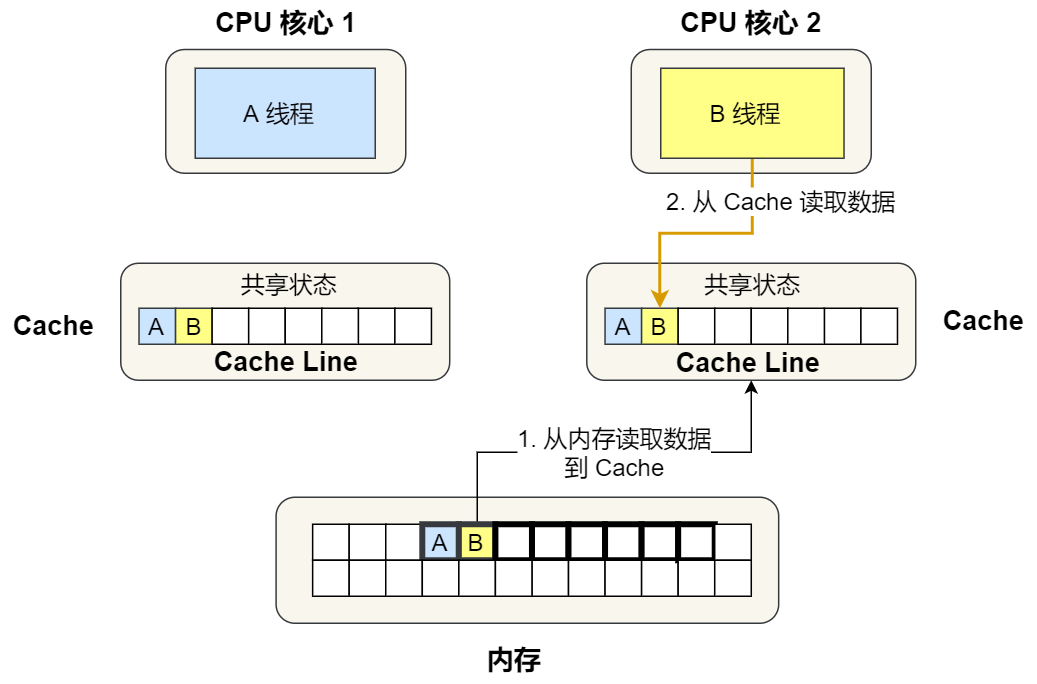
③. 接着,2 号核心开始从内存里读取变量 B,同样的也是读取 Cache Line 大小的数据到 Cache 中,此 Cache Line 中的数据也包含了变量 A 和 变量 B,此时 1 号和 2 号核心的 Cache Line 状态变为「共享」状态。
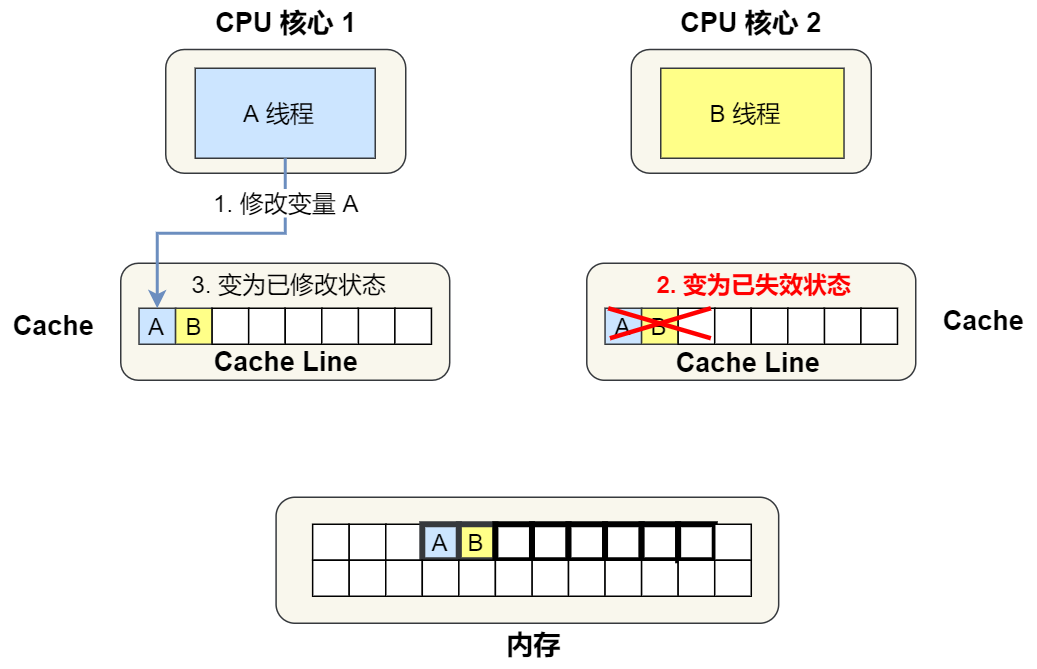
④. 1 号核心需要修改变量 A,发现此 Cache Line 的状态是「共享」状态,所以先需要通过总线发送消息给 2 号核心,通知 2 号核心把 Cache 中对应的 Cache Line 标记为「已失效」状态,然后 1 号核心对应的 Cache Line 状态变成「已修改」状态,并且修改变量 A。
⑤. 之后,2 号核心需要修改变量 B,此时 2 号核心的 Cache 中对应的 Cache Line 是已失效状态,另外由于 1 号核心的 Cache 也有此相同的数据,且状态为「已修改」状态,所以要先把 1 号核心的 Cache 对应的 Cache Line 写回到内存,然后 2 号核心再从内存读取 Cache Line 大小的数据到 Cache 中,最后把变量 B 修改到 2 号核心的 Cache 中,并将状态标记为「已修改」状态。
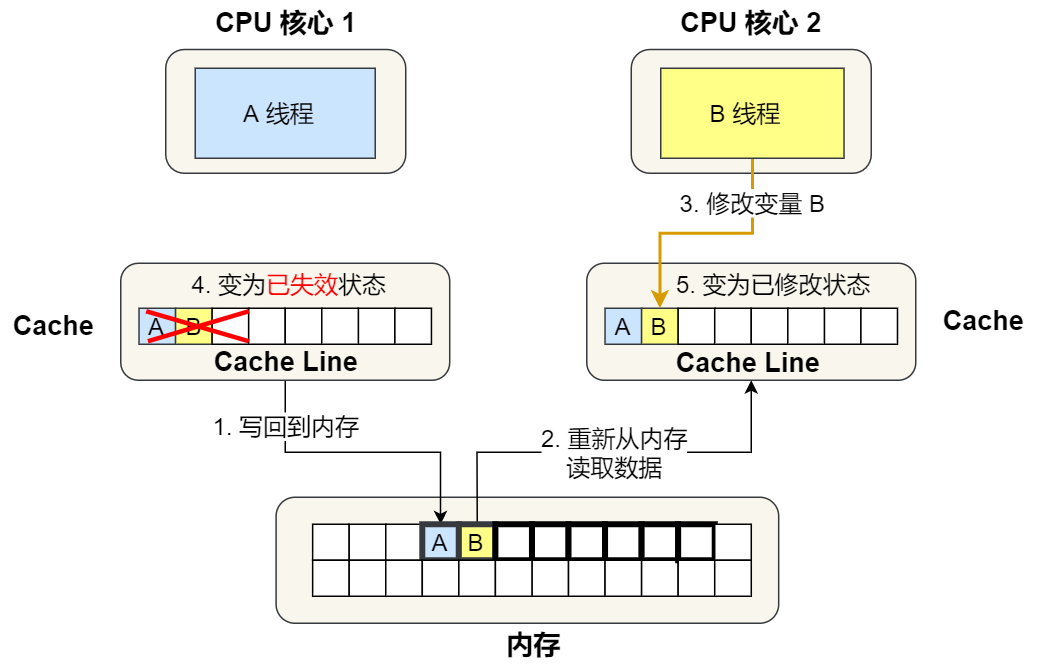
所以,可以发现如果 1 号和 2 号 CPU 核心这样持续交替的分别修改变量 A 和 B,就会重复 ④ 和 ⑤ 这两个步骤,Cache 并没有起到缓存的效果,虽然变量 A 和 B 之间其实并没有任何的关系,但是因为同时归属于一个 Cache Line,这个 Cache Line 中的任意数据被修改后,都会相互影响,从而出现 ④ 和 ⑤ 这两个步骤。
因此,这种因为多个线程同时读写同一个 Cache Line 的不同变量时,而导致 CPU Cache 失效的现象称为伪共享(False Sharing)。
避免伪共享的方法
因此,对于多个线程共享的热点数据,即经常会修改的数据,应该避免这些数据刚好在同一个 Cache Line 中,否则就会出现为伪共享的问题。
避免 Cache 伪共享实际上是用空间换时间的思想,通过字节填充浪费一部分 Cache 空间,从而换来性能的提升。
我们再来看一个应用层面的规避方案,有一个 Java 并发框架 Disruptor 使用「字节填充 + 继承」的方式,来避免伪共享的问题。
一般 64 位 CPU 的 CPU Cache Line 的大小是 64 个字节,一个 long 类型的数据是 8 个字节,所以 CPU 一下会加载 8 个 long 类型的数据。
RingBufferPad 使用 7 个 long 类型数据作为 Cache Line 前置填充, 7 个 long 类型数据则作为 Cache Line 后置填充,这 14 个 long 变量没有任何实际用途,更不会对它们进行读写操作。
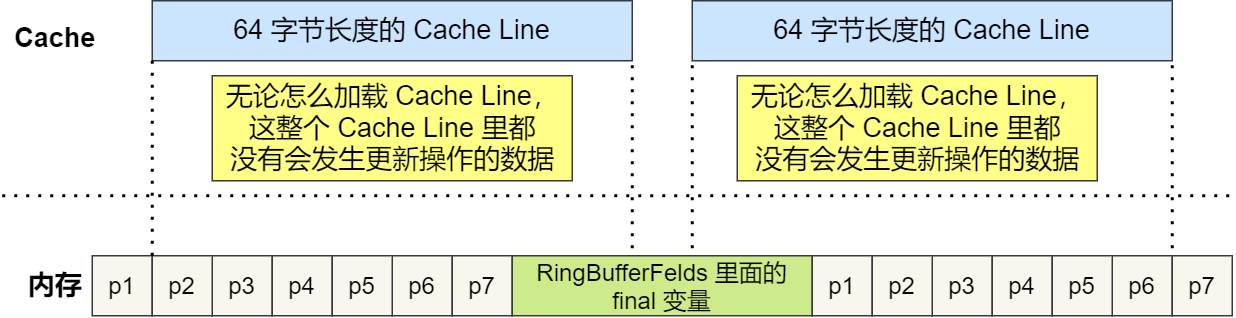
另外,RingBufferFelds 里面定义的这些变量都是 final 修饰的,意味着第一次加载之后不会再修改,又由于「前后」各填充了 7 个不会被读写的 long 类型变量,所以无论怎么加载 Cache Line,这整个 Cache Line 里都没有会发生更新操作的数据,于是只要数据被频繁地读取访问,就自然没有数据被换出 Cache 的可能,也因此不会产生伪共享的问题。
CPU 如何选择线程的?
在 Linux 内核中,进程和线程都是用 task_struct 结构体表示的,区别在于线程的 task_struct 结构体里部分资源是共享了进程已创建的资源,比如内存地址空间、代码段、文件描述符等,所以 Linux 中的线程也被称为轻量级进程,因为线程的 task_struct 相比进程的 task_struct 承载的 资源比较少,因此以「轻」得名。 (任何一个进程都至少一个主线程)
所以,Linux 内核里的调度器,调度的对象就是 task_struct,接下来我们就把这个数据结构统称为任务。
在 Linux 系统中,根据任务的优先级以及响应要求,主要分为两种,其中优先级的数值越小,优先级越高:
- 实时任务,对系统的响应时间要求很高,也就是要尽可能快的执行实时任务,优先级在
0~99范围内的就算实时任务; - 普通任务,响应时间没有很高的要求,优先级在
100~139范围内都是普通任务级别;
调度类
Deadline 和 Realtime 这两个调度类,都是应用于实时任务的,这两个调度类的调度策略合起来共有这三种,它们的作用如下:
- SCHED_DEADLINE:是按照 deadline 进行调度的,距离当前时间点最近的 deadline 的任务会被优先调度;
- SCHED_FIFO:对于相同优先级的任务,按先来先服务的原则,但是优先级更高的任务,可以抢占低优先级的任务,也就是优先级高的可以「插队」;
- SCHED_RR:对于相同优先级的任务,轮流着运行,每个任务都有一定的时间片,当用完时间片的任务会被放到队列尾部,以保证相同优先级任务的公平性,但是高优先级的任务依然可以抢占低优先级的任务;
而 Fair 调度类是应用于普通任务,都是由 CFS 调度器管理的,分为两种调度策略:
- SCHED_NORMAL:普通任务使用的调度策略;
- SCHED_BATCH:后台任务的调度策略,不和终端进行交互,因此在不影响其他需要交互的任务,可以适当降低它的优先级。
完全公平调度
这个算法的理念是想让分配给每个任务的 CPU 时间是一样,于是它为每个任务安排一个虚拟运行时间 vruntime,如果一个任务在运行,其运行的越久,该任务的 vruntime 自然就会越大,而没有被运行的任务,vruntime 是不会变化的。
那么,在 CFS 算法调度的时候,会优先选择 vruntime 少的任务,以保证每个任务的公平性。
在计算虚拟运行时间 vruntime 还要考虑普通任务的权重值,注意权重值并不是优先级的值,内核中会有一个 nice 级别与权重值的转换表,nice 级别越低的权重值就越大
CPU 运行队列
一个系统通常都会运行着很多任务,多任务的数量基本都是远超 CPU 核心数量,因此这时候就需要排队。
事实上,每个 CPU 都有自己的运行队列(Run Queue, rq),用于描述在此 CPU 上所运行的所有进程,其队列包含三个运行队列,Deadline 运行队列 dl_rq、实时任务运行队列 rt_rq 和 CFS 运行队列 cfs_rq,其中 cfs_rq 是用红黑树来描述的,按 vruntime 大小来排序的,最左侧的叶子节点,就是下次会被调度的任务。
这几种调度类是有优先级的,优先级如下:Deadline > Realtime > Fair,这意味着 Linux 选择下一个任务执行的时候,会按照此优先级顺序进行选择,也就是说先从 dl_rq 里选择任务,然后从 rt_rq 里选择任务,最后从 cfs_rq 里选择任务。因此,实时任务总是会比普通任务优先被执行。
调整优先级
如果我们启动任务的时候,没有特意去指定优先级的话,默认情况下都是普通任务,普通任务的调度类是 Fair,由 CFS 调度器来进行管理。CFS 调度器的目的是实现任务运行的公平性,也就是保障每个任务的运行的时间是差不多的。
如果你想让某个普通任务有更多的执行时间,可以调整任务的 nice 值,从而让优先级高一些的任务执行更多时间。nice 的值能设置的范围是 -20~19,值越低,表明优先级越高,因此 -20 是最高优先级,19 则是最低优先级,默认优先级是 0。
是不是觉得 nice 值的范围很诡异?事实上,nice 值并不是表示优先级,而是表示优先级的修正数值,它与优先级(priority)的关系是这样的:priority(new) = priority(old) + nice。内核中,priority 的范围是 0~139,值越低,优先级越高,其中前面的 0~99 范围是提供给实时任务使用的,而 nice 值是映射到 100~139,这个范围是提供给普通任务用的,因此 nice 值调整的是普通任务的优先级。