
Redis 数据结构
Redis 为什么那么快?
除了它是内存数据库,使得所有的操作都在内存上进行之外,还有一个重要因素,它实现的数据结构,使得我们对数据进行增删查改操作时,Redis 能高效的处理。
键值对数据库是怎么实现的?
Redis 的键值对中的 key 就是字符串对象,而 value 可以是字符串对象,也可以是集合数据类型的对象,比如 List 对象、Hash 对象、Set 对象和 Zset 对象。
Redis 是使用了一个「哈希表」保存所有键值对,哈希表的最大好处就是让我们可以用 O(1) 的时间复杂度来快速查找到键值对。哈希表其实就是一个数组,数组中的元素叫做哈希桶。
哈希桶存放的是指向键值对数据的指针(dictEntry*),这样通过指针就能找到键值对数据,保存了 void * key 和 void * value 指针,分别指向了实际的键对象和值对象,这样一来,即使值是集合数据,也可以通过 void * value 指针找到。
我这里画了一张 Redis 保存键值对所涉及到的数据结构。

这里先大概说下图中涉及到的数据结构的名字和用途:
redisDb 结构,表示 Redis 数据库的结构,结构体里存放了指向了 dict 结构的指针;
- 总体数据库结构
dict 结构,结构体里存放了 2 个哈希表,正常情况下都是用「哈希表 1」,「哈希表 2」只有在 rehash 的时候才用;
ditctht 结构,表示哈希表的结构,结构里存放了哈希表数组,数组中的每个元素都是指向一个哈希表节点结构(dictEntry)的指针;
dictEntry 结构,表示哈希表节点的结构,结构里存放了 **void * key 和 void * value 指针, key 指向的是 String 对象,而 value 则可以指向 String 对象,也可以指向集合类型的对象,比如 List 对象、Hash 对象、Set 对象和 Zset 对象。
特别说明下,void * key 和 void * value 指针指向的是 Redis 对象,Redis 中的每个对象都由 redisObject 结构表示,如下图:

对象结构里包含的成员变量:
- type,标识该对象是什么类型的对象(String 对象、List 对象、Hash 对象、Set 对象和 Zset 对象);
- encoding,标识该对象使用了哪种底层的数据结构;
- ptr,指向底层数据结构的指针。
我画了一张 Redis 键值对数据库的全景图,你就能清晰知道 Redis 对象和数据结构的关系了:

SDS
Redis 是用 C 语言实现的,但是它没有直接使用 C 语言的 char* 字符数组来实现字符串,而是自己封装了一个名为简单动态字符串(simple dynamic string,SDS)的数据结构来表示字符串,也就是 Redis 的 String 数据类型的底层数据结构是 SDS。
C 语言字符串的缺陷
- 获取字符串长度的时间复杂度为 O(N);
- 字符串的结尾是以“\0”字符标识,字符串里面不能包含有“\0”字符,因此不能保存二进制数据;
- 字符串操作函数不高效且不安全,比如有缓冲区溢出的风险,有可能会造成程序运行终止;
SDS 结构设计
下图就是 Redis 5.0 的 SDS 的数据结构:

结构中的每个成员变量分别介绍下:
len,记录了字符串长度。
- 在获取字符串长度的时候,直接返回这个成员变量的值就行,所以复杂度只有 O(1)。
alloc,分配给字符数组的空间长度。
alloc 和 len 成员变量让SDS API 通过
alloc - len计算剩余可用的空间大小,在对字符串做修改操作的时候,就可以由程序内部判断缓冲区大小是否足够用。当判断出缓冲区大小不够用时,Redis 会自动将扩大 SDS 的空间大小。如果所需的 sds 长度小于 1 MB,那么最后的扩容是按照翻倍扩容来执行的,即 2 倍的 newlen
如果所需的 sds 长度超过 1 MB,那么最后的扩容长度应该是 newlen + 1MB。
flags,用来表示不同类型的 SDS。一共设计了 5 种类型,分别是 sdshdr5、sdshdr8、sdshdr16、sdshdr32 和 sdshdr64,后面在说明区别之处。
- 灵活保存不同大小的字符串,从而有效节省内存空间。
buf[],字符数组,用来保存实际数据。
- SDS 的 API 都是以处理二进制的方式来处理 SDS 存放在 buf[] 里的数据,程序不会对其中的数据做任何限制,数据写入的时候时什么样的,它被读取时就是什么样的。因此除了文本数据还能保存任意格式的二进制数据。
Redis 在编程上还告诉编译器取消结构体在编译过程中的优化对齐,按照实际占用字节数进行对齐,因此占用空间小,效率高
链表
Redis 的 List 对象的底层实现之一就是链表。C 语言本身没有链表这个数据结构的,所以 Redis 自己设计了一个链表数据结构。
- Redis 链表是一个双向链表
压缩列表
压缩列表结构设计
压缩列表是 Redis 为了节约内存而开发的,它是由连续内存块组成的顺序型数据结构,有点类似于数组。

压缩列表在表头有三个字段:
- zlbytes,记录整个压缩列表占用的内存字节数;
- zltail,记录压缩列表「尾部」节点距离起始地址由多少字节,也就是列表尾的偏移量;
- zllen,记录压缩列表包含的节点数量;
- zlend,标记压缩列表的结束点,固定值 0xFF(十进制 255)。
在压缩列表中,如果我们要查找定位第一个元素和最后一个元素,可以通过表头三个字段(zllen)的长度直接定位,复杂度是 O(1)。而查找其他元素时,就没有这么高效了,只能逐个查找,此时的复杂度就是 O(N) 了,因此压缩列表不适合保存过多的元素。
另外,压缩列表节点(entry)的构成如下:
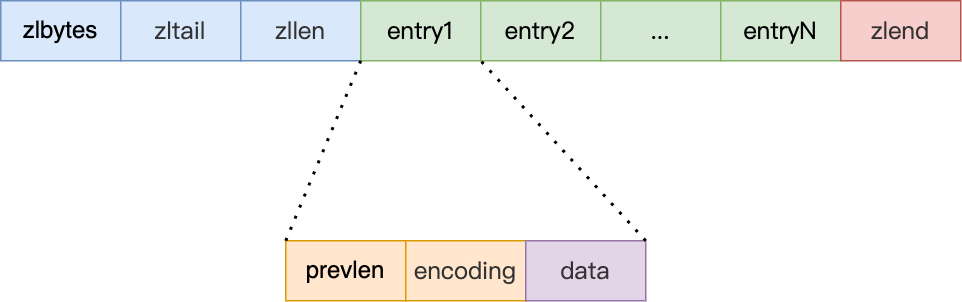
压缩列表节点包含三部分内容:
- prevlen,记录了「前一个节点」的长度,目的是为了实现从后向前遍历;
- encoding,记录了当前节点实际数据的「类型和长度」,类型主要有两种:字符串和整数。
- data,记录了当前节点的实际数据,类型和长度都由
encoding决定;
当我们往压缩列表中插入数据时,压缩列表就会根据数据类型是字符串还是整数,以及数据的大小,会使用不同空间大小的 prevlen 和 encoding 这两个元素里保存的信息,这种根据数据大小和类型进行不同的空间大小分配的设计思想,正是 Redis 为了节省内存而采用的。
分别说下,prevlen 和 encoding 是如何根据数据的大小和类型来进行不同的空间大小分配。
压缩列表里的每个节点中的 prevlen 属性都记录了「前一个节点的长度」,而且 prevlen 属性的空间大小跟前一个节点长度值有关,比如:
- 如果前一个节点的长度小于 254 字节,那么 prevlen 属性需要用 1 字节的空间来保存这个长度值;
- 如果前一个节点的长度大于等于 254 字节,那么 prevlen 属性需要用 5 字节的空间来保存这个长度值;
encoding 属性的空间大小跟数据是字符串还是整数,以及字符串的长度有关:
- 如果当前节点的数据是整数,则 encoding 会使用 1 字节的空间进行编码。通过 encoding 确认了整数类型,就可以确认整数数据的实际大小了,比如如果 encoding 编码确认了数据是 int16 整数,那么 data 的长度就是 int16 的大小。
- 如果当前节点的数据是字符串,根据字符串的长度大小,encoding 会使用 1 字节/2 字节/5 字节的空间进行编码,encoding 编码的前两个 bit 表示数据的类型,后续的其他 bit 标识字符串数据的实际长度,即 data 的长度。
连锁更新
压缩列表除了查找复杂度高的问题,还有一个问题。
压缩列表新增某个元素或修改某个元素时,如果空间不够,压缩列表占用的内存空间就需要重新分配。而当新插入的元素较大时,可能会导致后续元素的 prevlen 占用空间都发生变化,从而引起「连锁更新」问题,导致每个元素的空间都要重新分配,造成访问压缩列表性能的下降。
现在假设一个压缩列表中有多个连续的、长度在 250~253 之间的节点,如下图:

因为这些节点长度值小于 254 字节,所以 prevlen 属性需要用 1 字节的空间来保存这个长度值。
这时,如果将一个长度大于等于 254 字节的新节点加入到压缩列表的表头节点,即新节点将成为 e1 的前置节点,如下图:

因为 e1 节点的 prevlen 属性只有 1 个字节大小,无法保存新节点的长度,此时就需要对压缩列表的空间重分配操作,并将 e1 节点的 prevlen 属性从原来的 1 字节大小扩展为 5 字节大小。
多米诺牌的效应就此开始。

e1 原本的长度在 250~253 之间,因为刚才的扩展空间,此时 e1 的长度就大于等于 254 了,因此原本 e2 保存 e1 的 prevlen 属性也必须从 1 字节扩展至 5 字节大小。
正如扩展 e1 引发了对 e2 扩展一样,扩展 e2 也会引发对 e3 的扩展,而扩展 e3 又会引发对 e4 的扩展…… 一直持续到结尾。
这种在特殊情况下产生的连续多次空间扩展操作就叫做「连锁更新」。
因此,压缩列表只会用于保存的节点数量不多的场景,只要节点数量足够小,即使发生连锁更新,也是能接受的。
哈希表
哈希表中的每一个 key 都是独一无二的。Hash 对象的实现之一就是哈希表。
哈希表优点在于,它能以 O(1) 的复杂度快速查询数据。
但是在哈希表大小固定的情况下,随着数据不断增多,那么哈希冲突的可能性也会越高。
Redis 采用了「链式哈希」来解决哈希冲突。
哈希表结构设计
Redis 的哈希表结构如下:
typedef struct dictht {
//哈希表数组
dictEntry **table;
//哈希表大小
unsigned long size;
//哈希表大小掩码,用于计算索引值
unsigned long sizemask;
//该哈希表已有的节点数量
unsigned long used;
} dictht;可以看到,哈希表是一个数组(dictEntry **table),数组的每个元素是一个指向「哈希表节点(dictEntry)」的指针。

哈希表节点的结构如下:
typedef struct dictEntry {
//键值对中的键
void *key;
//键值对中的值
union {
void *val;
uint64_t u64;
int64_t s64;
double d;
} v;
//指向下一个哈希表节点,形成链表
struct dictEntry *next;
} dictEntry;dictEntry 结构里不仅包含指向键和值的指针,还包含了指向下一个哈希表节点的指针,这个指针用来实现链式哈希。被分配到同一个哈希桶上的多个节点可以用这个单项链表连接起来,当链表长度太长会导致出现O(n)时间复杂度
Redis不使用红黑树解决冲突是因为红黑树比较复杂,且红黑树的节点相比链表占用内存更多,维护也较为复杂
dictEntry 结构里键值对中的值是一个「联合体 v」定义,因为当「值」是整数或浮点数时,就可以将值的数据内嵌在 dictEntry 结构里,无需再用一个指针指向实际的值,从而节省了内存空间,当值是结构体时使用指针。
rehash
在正常服务请求阶段,插入的数据,都会写入到「哈希表 1」,此时的「哈希表 2」并没有被分配空间。
随着数据逐步增多,触发了 rehash 操作,这个过程分为三步:
给「哈希表 2」分配空间,一般会比「哈希表 1」大 2 倍;
将「哈希表 1」的数据迁移到「哈希表 2」中;
- 如果「哈希表 1」的数据量非常大,那么在迁移至「哈希表 2」的时候,因为会涉及大量的数据拷贝,此时可能会对 Redis 造成阻塞,无法服务其他请求
迁移完成后,「哈希表 1」的空间会被释放,并把「哈希表 2」设置为「哈希表 1」,然后在「哈希表 2」新创建一个空白的哈希表,为下次 rehash 做准备。
渐进式 rehash
Redis 采用了渐进式 rehash,将数据的迁移的工作分多次迁移。
渐进式 rehash 步骤如下:
- 给「哈希表 2」分配空间;
- 在 rehash 进行期间,每次哈希表元素进行新增、删除、查找或者更新操作时,Redis 除了会执行对应的操作之外,还会顺序将「哈希表 1」中索引位置上的所有 key-value 迁移到「哈希表 2」上;
- 随着处理客户端发起的哈希表操作请求数量越多,最终在某个时间点会把「哈希表 1」的所有 key-value 迁移到「哈希表 2」,从而完成 rehash 操作。
- 没有文章显示的说明如果已知不rehash结束怎么办
- 可以设置超时时间,超时通过每次请求必定复制一个key的所有数据到hash2,这样一定可以复制完
- 或者闲时复制
避免了一次性 rehash 的耗时操作。
在进行渐进式 rehash 的过程中,哈希表元素的删除、查找、更新等操作都会在这两个哈希表进行。
比如,查找一个 key 的值的话,先会在「哈希表 1」里面进行查找,如果没找到,就会继续到哈希表 2 里面进行找到。
另外,在渐进式 rehash 进行期间,新增一个 key-value 时,会被保存到「哈希表 2」里面,而「哈希表 1」则不再进行任何添加操作,这样保证了「哈希表 1」的 key-value 数量只会减少,随着 rehash 操作的完成,最终「哈希表 1」就会变成空表。
rehash 触发条件
rehash 的触发条件跟**负载因子(load factor)**有关系。
负载因子可以通过下面这个公式计算:

触发 rehash 操作的条件,主要有两个:
- 当负载因子大于等于 1,并且 Redis 没有在执行 bgsave 命令或者 bgrewiteaof 命令,也就是没有执行 RDB 快照或没有进行 AOF 重写的时候,就会进行 rehash 操作。
- 当负载因子大于等于 5 时,此时说明哈希冲突非常严重了,不管有没有有在执行 RDB 快照或 AOF 重写,都会强制进行 rehash 操作。
整数集合
整数集合是 Set 对象的底层实现之一。当一个 Set 对象只包含整数值元素,并且元素数量不大时,就会使用整数集这个数据结构作为底层实现。
整数集合结构设计
整数集合本质上是一块连续内存空间,它的结构定义如下:
typedef struct intset {
//编码方式
uint32_t encoding;
//集合包含的元素数量
uint32_t length;
//保存元素的数组
int8_t contents[];
} intset;可以看到,保存元素的容器是一个 contents 数组,contents 数组的真正类型取决于 intset 结构体里的 encoding 属性的值。比如:
- 如果 encoding 属性值为 INTSET_ENC_INT16,那么 contents 就是一个 int16_t 类型的数组,数组中每一个元素的类型都是 int16_t(还有int32_t,int64_t);
整数集合的升级操作
当我们将一个新元素加入到整数集合里面,如果新元素的类型(int32_t)比整数集合现有所有元素的类型(int16_t)都要长时,整数集合需要先进行升级,也就是按新元素的类型(int32_t)扩展 contents 数组的空间大小,将数据按照原来集合的有序性重新安放,然后才能将新元素加入到整数集合里。
整数集合升级的过程不会重新分配一个新类型的数组,而是在原本的数组上扩展空间,然后在将每个元素按间隔类型大小分割,如果 encoding 属性值为 INTSET_ENC_INT16,则每个元素的间隔就是 16 位。
整数集合升级的好处是节省内存资源。
如果一直向整数集合添加 int16_t 类型的元素,那么整数集合的底层实现就一直是用 int16_t 类型的数组,只有在我们要将 int32_t 类型或 int64_t 类型的元素添加到集合时,才会对数组进行升级操作。
整数集合不支持降级操作,一旦对数组进行了升级,就会一直保持升级后的状态。
跳表
Redis 只有 Zset 对象的底层实现用到了跳表,跳表的优势是能支持平均 O(logN) 复杂度的节点查找。
zset 结构体里有两个数据结构:一个是跳表,一个是哈希表。这样的好处是既能进行高效的范围查询,也能进行高效单点查询。
typedef struct zset {
dict *dict;
zskiplist *zsl;
} zset;Zset 对象在执行数据插入或是数据更新的过程中,会依次在跳表和哈希表中插入或更新相应的数据,从而保证了跳表和哈希表中记录的信息一致。
Zset 对象能支持范围查询(如 ZRANGEBYSCORE 操作),这是因为它的数据结构设计采用了跳表,而又能以常数复杂度获取元素权重(如 ZSCORE 操作),这是因为它同时采用了哈希表进行索引。
跳表结构设计

图中头节点有 L0~L2 三个头指针,分别指向了不同层级的节点,然后每个层级的节点都通过指针连接起来:
- L0 层级共有 5 个节点,分别是节点 1、2、3、4、5;
- L1 层级共有 3 个节点,分别是节点 2、3、5;
- L2 层级只有 1 个节点,也就是节点 3。
如果我们要在链表中查找节点 4 这个元素,只能从头开始遍历链表,需要查找 4 次,而使用了跳表后,只需要查找 2 次就能定位到节点 4,因为可以在头节点直接从 L2 层级跳到节点 3,然后再往前遍历找到节点 4。
可以看到,这个查找过程就是在多个层级上跳来跳去,最后定位到元素。当数据量很大时,跳表的查找复杂度就是 O(logN)。
那跳表节点是怎么实现多层级的呢?这就需要看「跳表节点」的数据结构了,如下:
typedef struct zskiplistNode {
//Zset 对象的元素值
sds ele;
//元素权重值
double score;
//后向指针
struct zskiplistNode *backward;
//节点的 level 数组,保存每层上的前向指针和跨度
struct zskiplistLevel {
struct zskiplistNode *forward;
unsigned long span;
} level[];
} zskiplistNode;Zset 对象要同时保存「元素」和「元素的权重」,对应到跳表节点结构里就是 sds 类型的 ele 变量和 double 类型的 score 变量。每个跳表节点都有一个后向指针(struct zskiplistNode *backward),指向前一个节点,目的是为了方便从跳表的尾节点开始访问节点,这样倒序查找时很方便。
跳表是一个带有层级关系的链表,而且每一层级可以包含多个节点,每一个节点通过指针连接起来,实现这一特性就是靠跳表节点结构体中的zskiplistLevel 结构体类型的 level 数组。
level 数组中的每一个元素代表跳表的一层,也就是由 zskiplistLevel 结构体表示,比如 leve[0] 就表示第一层,leve[1] 就表示第二层。zskiplistLevel 结构体里定义了「指向下一个跳表节点的指针」和「跨度」,跨度时用来记录两个节点之间的距离。
比如,下面这张图,展示了各个节点的跨度。

第一眼看到跨度的时候,以为是遍历操作有关,实际上并没有任何关系,遍历操作只需要用前向指针(struct zskiplistNode *forward)就可以完成了。
跨度实际上是为了计算这个节点在跳表中的排位。具体怎么做的呢?因为跳表中的节点都是按序排列的,那么计算某个节点排位的时候,从头节点点到该结点的查询路径上,将沿途访问过的所有层的跨度累加起来,得到的结果就是目标节点在跳表中的排位。
举个例子,查找图中节点 3 在跳表中的排位,从头节点开始查找节点 3,查找的过程只经过了一个层(L2),并且层的跨度是 3,所以节点 3 在跳表中的排位是 3。
问题来了,由谁定义哪个跳表节点是头节点呢?这就介绍「跳表」结构体了,如下所示:
typedef struct zskiplist {
struct zskiplistNode *header, *tail;
unsigned long length;
int level;
} zskiplist;跳表结构里包含了:
- 跳表的头尾节点,便于在 O(1) 时间复杂度内访问跳表的头节点和尾节点;
- 跳表的长度,便于在 O(1) 时间复杂度获取跳表节点的数量;
- 跳表的最大层数,便于在 O(1) 时间复杂度获取跳表中层高最大的那个节点的层数量;
跳表节点查询过程
查找一个跳表节点的过程时,跳表会从头节点的最高层开始,逐一遍历每一层。在遍历某一层的跳表节点时,会用跳表节点中的 SDS 类型的元素和元素的权重来进行判断,共有两个判断条件:
- 如果当前节点的权重「小于」要查找的权重时,跳表就会访问该层上的下一个节点。
- 如果当前节点的权重「等于」要查找的权重时,并且当前节点的 SDS 类型数据「小于」要查找的数据时,跳表就会访问该层上的下一个节点。
如果上面两个条件都不满足,或者下一个节点为空时,跳表就会使用目前遍历到的节点的 level 数组里的下一层指针,然后沿着下一层指针继续查找,这就相当于跳到了下一层接着查找。
举个例子,下图有个 3 层级的跳表。

如果要查找「元素:abcd,权重:4」的节点,查找的过程是这样的:
- 先从头节点的最高层开始,L2 指向了「元素:abc,权重:3」节点,这个节点的权重比要查找节点的小,所以要访问该层上的下一个节点;
- 但是该层的下一个节点是空节点(leve[2]指向的是空节点),于是就会跳到「元素:abc,权重:3」节点的下一层去找,也就是 leve[1];
- 「元素:abc,权重:3」节点的 leve[1] 的下一个指针指向了「元素:abcde,权重:4」的节点,然后将其和要查找的节点比较。虽然「元素:abcde,权重:4」的节点的权重和要查找的权重相同,但是当前节点的 SDS 类型数据「大于」要查找的数据,所以会继续跳到「元素:abc,权重:3」节点的下一层去找,也就是 leve[0];
- 「元素:abc,权重:3」节点的 leve[0] 的下一个指针指向了「元素:abcd,权重:4」的节点,该节点正是要查找的节点,查询结束。
跳表节点层数设置
跳表的相邻两层的节点数量的比例会影响跳表的查询性能。
举个例子,下图的跳表,第二层的节点数量只有 1 个,而第一层的节点数量有 6 个。

这时,如果想要查询节点 6,那基本就跟链表的查询复杂度一样,就需要在第一层的节点中依次顺序查找,复杂度就是 O(N) 了。所以,为了降低查询复杂度,我们就需要维持相邻层结点数间的关系。
跳表的相邻两层的节点数量最理想的比例是 2:1,查找复杂度可以降低到 O(logN)。
下图的跳表就是,相邻两层的节点数量的比例是 2 : 1。

那怎样才能维持相邻两层的节点数量的比例为 2 : 1 呢?
如果采用新增节点或者删除节点时,来调整跳表节点以维持比例的方法的话,会带来额外的开销。
Redis 则采用一种巧妙的方法是,跳表在创建节点的时候,随机生成每个节点的层数,并没有严格维持相邻两层的节点数量比例为 2 : 1 的情况。
具体的做法是,跳表在创建节点时候,会生成范围为[0-1]的一个随机数,如果这个随机数小于 0.25(相当于概率 25%),那么层数就增加 1 层,然后继续生成下一个随机数,直到随机数的结果大于 0.25 结束,最终确定该节点的层数。
这样的做法,相当于每增加一层的概率不超过 25%,层数越高,概率越低,层高最大限制是 64。
虽然我前面讲解跳表的时候,图中的跳表的「头节点」都是 3 层高,但是其实如果层高最大限制是 64,那么在创建跳表「头节点」的时候,就会直接创建 64 层高的头节点。
如下代码,创建跳表时,头节点的 level 数组有 ZSKIPLIST_MAXLEVEL 个元素(层),节点不存储任何 member 和 score 值,level 数组元素的 forward 都指向 NULL,span 值都为 0。
点击查看完整代码实现
点击查看完整代码实现
/* Create a new skiplist. */
zskiplist *zslCreate(void) {
int j;
zskiplist *zsl;
zsl = zmalloc(sizeof(*zsl));
zsl->level = 1;
zsl->length = 0;
zsl->header = zslCreateNode(ZSKIPLIST_MAXLEVEL,0,NULL);
for (j = 0; j < ZSKIPLIST_MAXLEVEL; j++) {
zsl->header->level[j].forward = NULL;
zsl->header->level[j].span = 0;
}
zsl->header->backward = NULL;
zsl->tail = NULL;
return zsl;
}:::
其中,ZSKIPLIST_MAXLEVEL 定义的是最高的层数,Redis 7.0 定义为 32,Redis 5.0 定义为 64,Redis 3.0 定义为 32。
为什么用跳表而不用平衡树?
这里插一个常见的面试题:为什么 Zset 的实现用跳表而不用平衡树(如 AVL 树、红黑树等)?
主要是从内存占用、对范围查找的支持、实现难易程度这三方面总结的原因:
- 从内存占用上来比较,跳表比平衡树更灵活一些。平衡树每个节点包含 2 个指针(分别指向左右子树),而跳表每个节点包含的指针数目平均为 1/(1-p),具体取决于参数 p 的大小。如果像 Redis 里的实现一样,取 p=1/4,那么平均每个节点包含 1.33 个指针,比平衡树更有优势。
- 在做范围查找的时候,跳表比平衡树操作要简单。在平衡树上,我们找到指定范围的小值之后,还需要以中序遍历的顺序继续寻找其它不超过大值的节点。如果不对平衡树进行一定的改造,这里的中序遍历并不容易实现。而在跳表上进行范围查找就非常简单,只需要在找到小值之后,对第 1 层链表进行若干步的遍历就可以实现。
- 从算法实现难度上来比较,跳表比平衡树要简单得多。平衡树的插入和删除操作可能引发子树的调整,逻辑复杂,而跳表的插入和删除只需要修改相邻节点的指针,操作简单又快速。
quicklist
其实 quicklist 就是「双向链表 + 压缩列表」组合,因为一个 quicklist 就是一个链表,而链表中的每个元素又是一个压缩列表。
quicklist 通过控制每个链表节点中的压缩列表的大小或者元素个数,来规避连锁更新的问题。因为压缩列表元素越少或越小,连锁更新带来的影响就越小,从而提供了更好的访问性能。
quicklist 结构设计
quicklist 的结构体跟链表的结构体类似,都包含了表头和表尾,区别在于 quicklist 的节点是 quicklistNode。
quicklistNode 结构体里包含了前一个节点和下一个节点指针,这样每个 quicklistNode 形成了一个双向链表。但是链表节点的元素不再是单纯保存元素值,而是保存了一个压缩列表,所以 quicklistNode 结构体里有个指向压缩列表的指针 *zl。
我画了一张图,方便你理解 quicklist 数据结构。

在向 quicklist 添加一个元素的时候,不会像普通的链表那样,直接新建一个链表节点。而是会检查插入位置的压缩列表是否能容纳该元素,如果能容纳就直接保存到 quicklistNode 结构里的压缩列表,如果不能容纳,才会新建一个新的 quicklistNode 结构。
quicklist 会控制 quicklistNode 结构里的压缩列表的大小或者元素个数,来规避潜在的连锁更新的风险,但是这并没有完全解决连锁更新的问题。
listpack
压缩列表连锁更新的问题,来源于它的结构设计,所以要想彻底解决这个问题,需要设计一个新的数据结构,而quicklistNode 还是用了压缩列表来保存元素,并没有完全解决这个问题。
于是,Redis 在 5.0 新设计一个数据结构叫 listpack,目的是替代压缩列表,它最大特点是 listpack 中每个节点不再包含前一个节点的长度了,压缩列表每个节点正因为需要保存前一个节点的长度字段,就会有连锁更新的隐患。
listpack 结构设计
listpack 采用了压缩列表的很多优秀的设计,比如还是用一块连续的内存空间来紧凑地保存数据,并且为了节省内存的开销,listpack 节点会采用不同的编码方式保存不同大小的数据。
我们先看看 listpack 结构:

listpack 头包含两个属性,分别记录了 listpack 总字节数和元素数量,然后 listpack 末尾也有个结尾标识。图中的 listpack entry 就是 listpack 的节点了。
每个 listpack 节点结构如下:

主要包含三个方面内容:
- encoding,定义该元素的编码类型,会对不同长度的整数和字符串进行编码;
- data,实际存放的数据;
- len,encoding+data 的总长度;
- 通过累加每个节点的
len字段值来回溯到前一个节点的起始位置。压缩列表只保存前一个数据的长度,没有保存当前数据的长度,插入的时候只有插入的元素需要变化长度
- 通过累加每个节点的
可以看到,listpack 没有压缩列表中记录前一个节点长度的字段了,listpack 只记录当前节点的长度,当我们向 listpack 加入一个新元素的时候,不会影响其他节点的长度字段的变化,从而避免了压缩列表的连锁更新问题。
读者问答
压缩列表的 entry 为什么要保存 prevlen 呢?listpack 改成 len 之后不会影响功能吗?
压缩列表的 entry 保存 prevlen 是为了实现节点从后往前遍历,知道前一个节点的长度,就可以计算前一个节点的偏移量。
listpack 一样可以支持从后往前遍历的。